In 2013 at the American Physical Society Division of Fluid Dynamics meeting (APS DFD) in Pittsburg, PA we presented several talks, posters and videos. Each of the titles is listed below along with a short abstract of each one.

Pop up height of buoyant rising spheres Tadd Truscott & Randy Munns
We examine the rising and surface breaching dynamics of buoyant spheres released at varying depths beneath the free surface in water over a range of Reynolds numbers (Re = 3×104 to 5×105 using high-speed imaging and particle image velocimetry. Buoyant spheres of sufficient speed pop up out of the free surface in varying ways depending on the conditions under the surface. Altering the release depth reveals varying exit angles, velocities, accelerations, and pop up heights at surface exit. Vortex shedding prior to free surface exit causes decelerations contributing to the variation in exit velocities and resulting pop up heights. Through a comprehensive study the phenomenon is extremely predictable. At lower Re, spheres released from shallow depths result in greater accelerations, velocities and pop up heights at the free surface compared to lower pop up heights when released from deeper depths (contrary to intuition). As the depth of release is increased the pop up height oscillates between a maximum and minimum. This is directly related to the proximity of the shed vortex to the free surface. For spheres of greater Re, pop up height increases linearly with release depth, demonstrating continued accelerations at free surface exit.

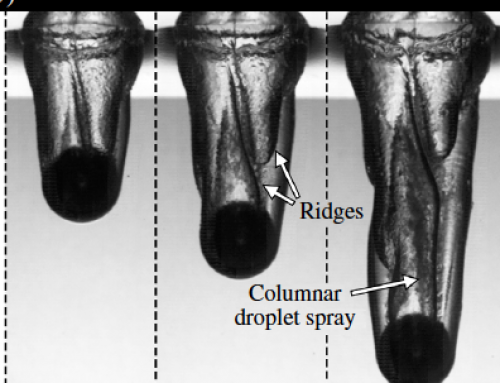
Urinal dynamics, Randy Hurd, Kip Hacking, Zhao Pan, Madi Boyer, & Tadd Truscott
In response to harsh and repeated criticisms from our mothers and several failed relationships with women, we present the splash dynamics of a simulated human male urine stream impacting rigid and free surfaces. Our study aims to reduce undesired splashing that may result from lavatory usage. Experiments are performed at a pressure and flow rate that would be expected from healthy male subjects.footnote{Lapides, J., Fundamentals of Urology, W.B. Saunders, Philadelphia, 1976.} For a rigid surface, the effects of stream breakup and surface impact angle on lateral and vertical droplet ejection distances are measured using high-speed photography and image processing. For free surface impact, the effects of velocity and fluid depth on droplet ejection distances are measured. Guided by our results, techniques for splash reduction are proposed.
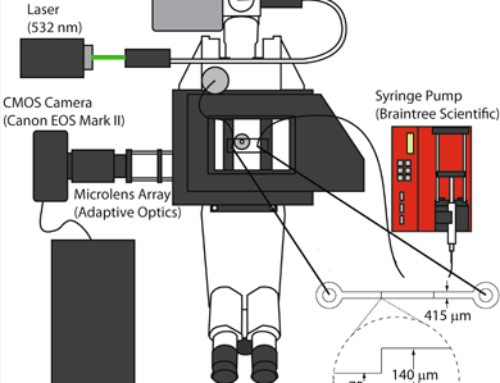
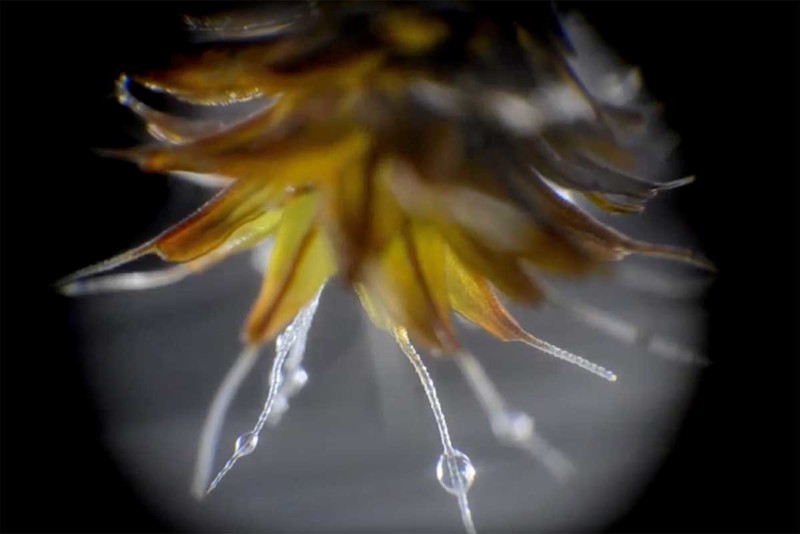
Moss hair water transport, Zhao Pan, N. Wu, Scott Thomson, William Pitt & Tadd Truscott
We present an investigation of water transportation on a moss ({it Syntrichia caninervis}) indigenous to temperate deserts. The moss typically appears to be in a dry, brown state, but is rehydrated by water during the wet season, making the desert green. Small hairs (500-2000
?m in length, and 40 ?m in diameter, {it d}) growing out from the tip of the moss leaves transport water back to the leaves. Through high speed observations and mathematical modeling it appears that this transportation is driven by two different mechanisms. 1) Droplet transport is achieved in three ways: i) A large (10{it d}) droplet attached between two intersecting fibers will move toward the bases of the leaves by the changing angle between the two hairs. ii) The shape of the moss hair is conical, thicker at the base, producing a gradient that moves fluid (5{it d}) toward the leaf similar to cactus spines. iii) We also observe that in some cases a Plateau-Rayleigh instability trigger a series of droplets moving toward the base. 2) Micro-grooves on the moss hair transport a film of water along the moss hair when larger droplets are not available. These various water transportation strategies combine to help the moss to survive in the desert and provide valuable insight.

Undergraduate ROV outreach, Kip Hacking, Randy Hurd, Geoff Wright & Tadd Truscott
Grumpy smelly, and apathy stricken middle school students often find science to be “uncool” and “hands-off.” We are changing this in our local area through an outreach program at ten participating middle schools building underwater remotely operated vehicles (ROV). Participants (300) were mentored by undergraduates (70) from BYU and instructed on various STEM topics including: electrical circuits, buoyancy, material science, design, and simple robotics. Through weekly visits these undergraduates provided teachers with immediate personal support to start their local ROV program, and enhanced their engineering curriculum at the middle school level. Each undergraduate also designed and built an instrument in an on-campus instrumentation class that were compatible with the younger student’s ROVs. Designs, videos and building instructions were posted online for current and future student access. This project culminated in a timed competition where students from each school used their ROVs to collect dive rings and maneuver through an underwater obstacle course. In this talk we will discuss how to increase your own outreach efforts by connecting undergraduates with local K-12 students using inexpensive ROVs and instrumentation projects.
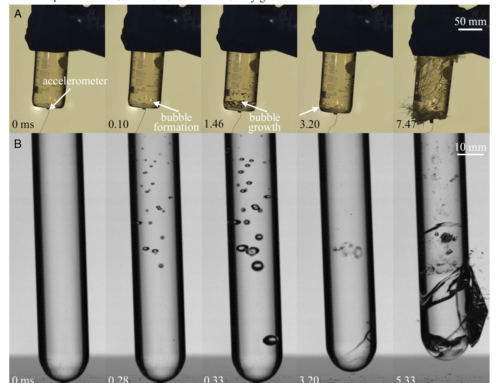
Optical sensor for detection of supercavity-body contact location
Jesse Belden, Michael Jandron & Tadd Truscott
Supercavitating vehicles have been the subject of intense research due to the potential for drag reduction and/or increased speeds. The control of such vehicles depends on accurate knowledge of planing forces generated by partial, transient wetting of afterbody surfaces. Measurement of the supercavity-body contact location, which determines the planing area, is thus critical for vehicle control. A robust sensor capable of measuring supercavity contact location along the length of a body is presented. The sensor operates on the optical principle of total internal reflection to differentiate between liquid and gas phases in contact with the body. An array of photodetectors is used to sense the presence or absence of light from a laser source to map the contact location. The theoretical operation and limitations of the sensor are discussed and several experiments are presented to validate the theory. Also, we present an elegant signal processing method to compensate for textit{in situ} changes in ambient light conditions.